Why drilling equipment condition-based maintenance needs operational context?
Condition-based Maintenance (CBM) is becoming ubiquitous today for monitoring equipment health in the drilling industry. One increasingly popular CBM solution is to use external sensors such as vibration and supply current sensors to predict abnormal equipment operations. External sensors are easy to install and they can collect much higher frequency data than internal equipment data to offer advanced detection capabilities.
While sensor-based CBM can work very well for equipment with constant load, such as those used in manufacturing plants, they fall short when it comes to drilling equipment. The reason for this is that drilling equipment operates with variable load - the workload ramps up and down depending on drilling conditions.
Let’s use mud pump as an example. Mud pump operational parameters such as pump speed varies based on operating conditions, as shown in the illustration below. This causes vibration to increase because the pump energy increases. So where should we set the vibration alert threshold?
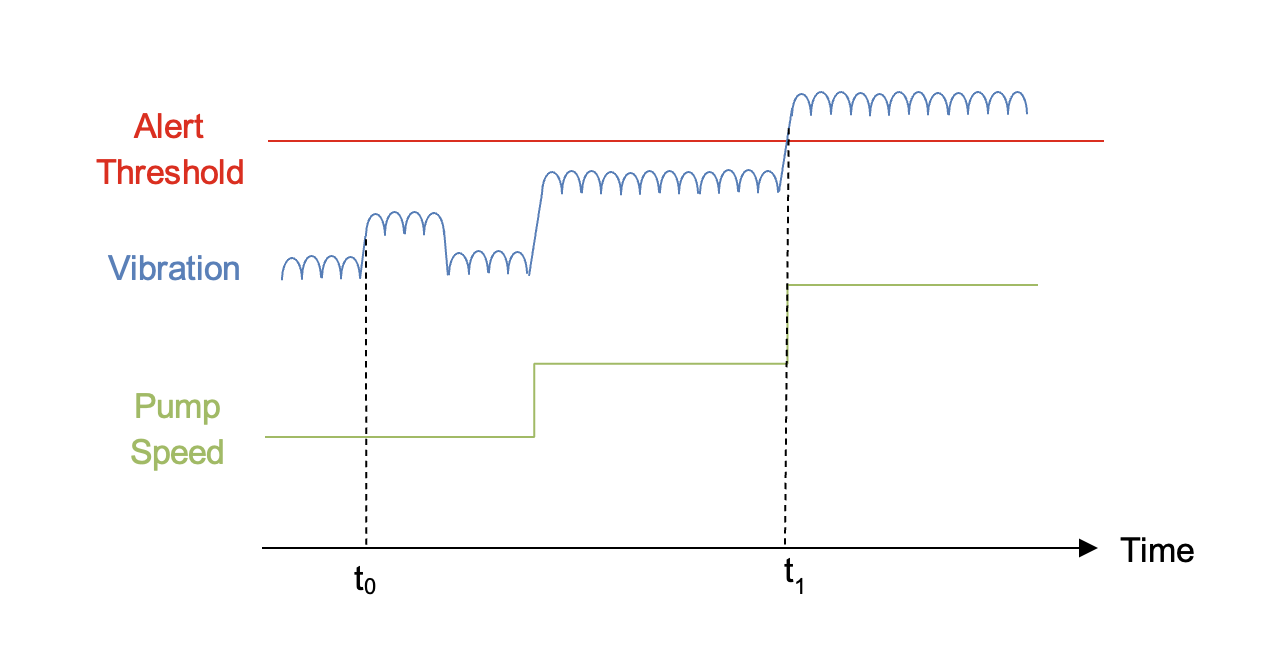
If we set the alert threshold too high, then we could miss failure events at low pump speed, such as the one happened at time t0 (a false negative). If we set it too low, then we could have too many false alerts at high pump speed, such as starting at t1 (false positives). Therefore, for sensor-only predictive maintenance solutions, it can be a struggle to optimize both false negatives and false positives for variable load systems.
The figure below shows a real-world case where the alert threshold was set too high and a failure in the mud pump power-end was missed. The alert threshold was set high to balance between false negatives and false positives, but it was not able to catch failures when the pump energy was low.

The correct solution is to adjust the alert threshold based on the operating condition, as illustrated below. The alert threshold is adjusted in real-time based on the pump speed, thus providing optimal results for all regions of operation.
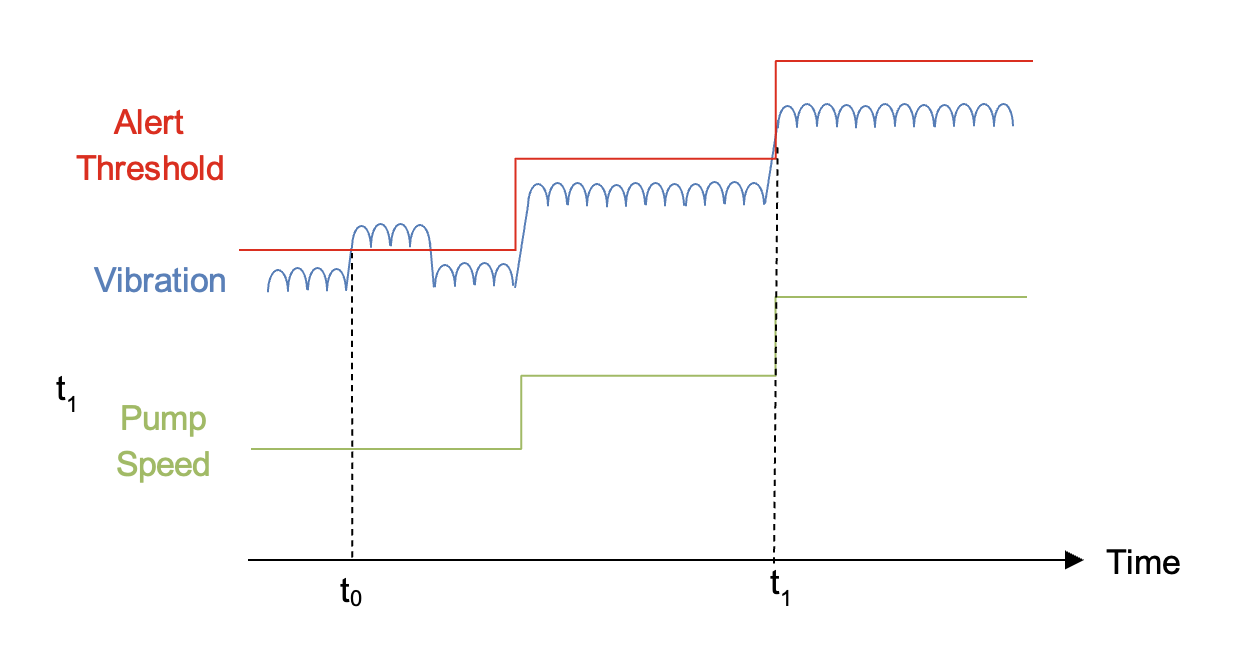
The actual implementation is more complex because pump energy not only depends on pump speed but also on other parameters such as pump pressure and mud quality, and the detection algorithm is not limited to threshold detection – it can be extended to any physics based or machine learning based algorithms.
Taking the above into considerations, real-world implementation has demonstrated a reduction in false negatives by more than 90%, without increase in false positives. Therefore, for drilling equipment such as mud pumps and top drives with wide operating load range, operational context greatly increases the accuracy of condition-based maintenance.
Prescient provides operationally context-aware CBM solutions that integrate operational data such as EDR and rig state to provide accurate failure predictions across complex rig operating conditions and states. For more details please contact us.